set_surface_model_param🔗
Short description🔗
set_surface_model_param — Set parameters and properties of a surface model.
Signature🔗
set_surface_model_param( surface_model SurfaceModelID, attribute.name GenParamName, attribute.value GenParamValue )
Description🔗
The operator set_surface_model_param sets parameters and
properties of the surface model SurfaceModelID.
The surface model must have been created by create_surface_model
or read_surface_model.
The names of the desired properties are passed in the generic parameter
GenParamName, the corresponding values are passed in
GenParamValue.
The possible values for GenParamName are listed below.
-
Defining cameras for image-based refinement. The following parameters allow to set and clear camera parameters and poses. Those are used by the operators
find_surface_model_imageandrefine_surface_model_pose_imageto project the surface model into the passed image.Note that the camera parameters must be set before the camera pose.
-
'camera_parameter':
-
'camera_parameter X': Sets the camera parameters for camera number X, where X is a zero-based index for the cameras. If not given, X defaults zero (first camera). The camera parameters are used by the operators
find_surface_model_imageandrefine_surface_model_pose_image, which use the images corresponding to the camera for the 3D pose refinement. Cameras must be added in increasing order. -
'camera_pose':
-
'camera_pose X': Sets the camera pose for camera number X, where X is a zero-based index for the cameras. If not given, X defaults zero (first camera). The pose defaults to the zero-pose [0, 0, 0, 0, 0, 0, 0] when adding a new camera with 'camera_parameter'. This usually means that camera and 3D sensor have the same point of origin.
-
'clear_cameras': Removes all previously set cameras from the surface model.
-
-
Defining Object Symmetries. The following parameters can be used to define symmetries of the 3D object which was used for the creation of the surface model. If the 3D object is symmetric, that information can be used to speed up the surface-based matching. Note that for surface models created with the 'train_3d_edges' parameter enabled, no symmetries can be set.
By default, no symmetry is active.
Note that for performance reasons, when changing the symmetry with any of the parameters below, certain internal data structures of the surface model are re-created, which can take a few seconds.
-
'symmetry_axis_direction': Set the direction of the symmetry axis of the model.
GenParamValuemust be a tuple with three numbers, containing the x-, y- and z-value of the axis direction. The model is modified to use this symmetry information for speeding up the matching process.To remove the symmetry information, pass an empty tuple in
GenParamValue. Note that either a symmetry axis or symmetry poses can be set, but not both.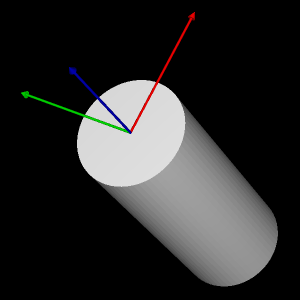
An object (cylinder) with the symmetry axis direction [0, 0, 1].
In case that 'symmetry_axis_direction' is used in combination with a restriction of the pose range as described below, the value of 'symmetry_axis_direction' is also used as if set with the parameter 'pose_restriction_allowed_axis_direction'.
-
'symmetry_axis_origin': Set a point on the symmetry axis of the model.
GenParamValuemust be a tuple with three numbers, which represent a point in model coordinates that lies on the symmetry axis of the model. This parameter is optional and defaults to the center of the model as returned byget_surface_model_param.In case that 'symmetry_axis_origin' is used in combination with a restriction of the pose range as described below, the value of 'symmetry_axis_origin' is also used as if set with the parameter 'pose_restriction_allowed_axis_origin'.
-
'symmetry_poses': Set one or more symmetry poses of the model (see
create_pose). The model must be identical when transformed with any of those poses. The model is modified to use this symmetry information for speeding up the matching process.When setting one or more symmetry poses,
set_surface_model_paramwill internally create all poses that can be created by chaining and inverting the passed poses. To obtain all internally created poses, useget_surface_model_paramwith the argument 'symmetry_poses_all'. If more than 100 poses are created internally, an error is returned, which indicates that the passed symmetry poses are invalid.To remove the symmetry poses, pass an empty tuple in
GenParamValue. Note that either a symmetry axis or symmetry poses can be set, but not both.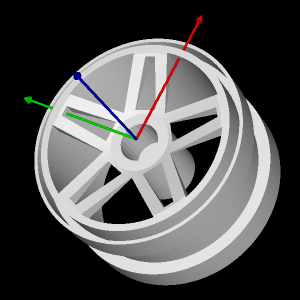
An object with a discontinuous symmetry. The symmetry pose for this object is [0, 0, 0, 0, 0, 360.0/5, 0].
-
-
Restrict the pose range. The following parameters can be used to restrict the range of rotations in which the surface model is searched for by
find_surface_model, or the allowed range of rotations for the refinement withrefine_surface_model_pose.By default, no pose range restriction is active.
Note that for performance reasons, when changing the pose range with any of the parameters below, certain internal data structures of the surface model are re-created, which can take a few seconds.
-
'pose_restriction_reference_pose': Set a reference pose of the model. The reference pose can be used along with 'pose_restriction_max_angle_diff', to restrict the allowed range of rotations of the model.
If
GenParamValueis an empty tuple, any previously set reference pose is cleared and no pose range restriction will be active for the model.Otherwise,
GenParamValuemust be a pose (seecreate_pose). Note that the translation part of the pose is ignored. Also note that both 'pose_restriction_reference_pose' and 'pose_restriction_max_angle_diff' must be set in order for the pose restriction to be active. -
'pose_restriction_max_angle_diff': Set by how much the rotation of a pose found with
find_surface_modelor refined withrefine_surface_model_posemay deviate from the rotation set with 'pose_restriction_reference_pose', in radians.If
GenParamValueis an empty tuple, any previously set maximum deviation angle is cleared and no pose range restriction will be active for the model.Otherwise,
GenParamValuemust be an angle, which indicates by how much the rotations of a detected pose 'P' and the reference pose 'R' set with 'pose_restriction_reference_pose' may differ. The comparison is performed for every model point using the formula \(\angle( R\mvVectorVar{v}, P\mvVectorVar{v}) \le \mathrm{max\_angle\_diff}\), where \(\mvVectorVar{v}\) is the 3D point vector. -
'pose_restriction_allowed_axis_direction': Set an axis for which rotations are ignored when evaluating the pose range (see 'pose_restriction_reference_pose' and 'pose_restriction_max_angle_diff'). If
GenParamValueis an empty tuple, any previously set axis is cleared.Otherwise,
GenParamValuemust contain a tuple of three numbers which are the direction of the axis in model coordinates.If such an axis is set, then a pose is considered to be within the allowed range if the angle between the axis in the reference pose and the compared pose is smaller than the allowed angle, using \(\angle(R\,\mathrm{axis}, P\,\mathrm{axis}) \le \mathrm{max\_angle\_diff}\).
-
'pose_restriction_allowed_axis_origin': Set a point on the allowed rotation axis of the model.
GenParamValuemust be a tuple with three numbers, which represent a point in model coordinates that lies on the symmetry axis of the model. This parameter is optional and defaults to the center of the model as returned byget_surface_model_param. -
'pose_restriction_filter_final_poses_only': This flag allows to switch between two different modes for the pose range restriction.
If
GenParamValueis 'false' (default), poses outside the defined pose range are removed early in the matching process. Use this setting if the object pose in the scene is always within the defined rotation range, but the object is sometimes found with incorrect rotations. Note that with this setting,find_surface_modelmight return poses that the algorithm considers to be locally suboptimal, because the locally more optimal poses are outside the allowed pose range. Also note that with this setting, the pose restriction is observed strictly. When passing an input pose torefine_surface_model_posethat is outside the allowed pose range, it will be transformed to be within the allowed pose range.If
GenParamValueis 'true', only the final poses are filtered before returning them. This allows removing poses that are valid object poses, but are not needed by the application because, for example, the object cannot be picked up by the robot in a certain orientation. Note that in this setting, less poses than requested might be returned byfind_surface_modelif one or more of the final poses are outside the allowed pose range.
-
-
Modifying self-similarities. The following parameters can be used to adapt the optimization regarding self-similar poses, i.e., poses under which the model is almost symmetric. The parameters can only be set if the parameter 'train_self_similar_poses' was activated during the call of
create_surface_model.Note that for performance reasons, when changing the self-similarity search with any of the parameters below, certain internal data structures of the surface model are re-created, which can take a few seconds.
-
'self_similar_poses': Set the self-similar poses of the model. Those are poses under which the model is very similar to itself and which can be confused during search.
find_surface_modelwill find such poses automatically if the parameter 'use_self_similar_poses' is activated. The poses can be obtained withget_surface_model_param. If the automatically determined poses are not sufficient to resolve self-similarities, the self-similar poses can be adapted with this parameter. It is usually not recommended to modify this parameter.GenParamValuemust contain a list of poses. The identity pose will automatically be added to the list of poses, if it is not already contained in it.
-
Attention🔗
Note that in some cases, if this operator encounters an error condition while modifying the surface model, such as an out-of-memory error, the model might be left in an inconsistent, partly changed state. In such cases, it is recommended to clear the surface model and to no longer use it.
This does not apply to error codes due to invalid parameters, which are checked before performing any model modification.
Also note that setting some of the options requires re-generation of
internal data structures and can take as long as the original
create_surface_model.
Execution information🔗
Execution information
-
Multithreading type: reentrant (runs in parallel with non-exclusive operators).
-
Multithreading scope: global (may be called from any thread).
-
Automatically parallelized on internal data level.
This operator modifies the state of the following input parameter:
During execution of this operator, access to the value of this parameter must be synchronized if it is used across multiple threads.
Parameters🔗
SurfaceModelID (input_control, state is modified) surface_model → (handle)
Handle of the surface model.
GenParamName (input_control) attribute.name → (string)
Name of the parameter.
Default: 'camera_parameter'
List of values: 'camera_parameter', 'camera_pose', 'clear_cameras', 'pose_restriction_allowed_axis_direction', 'pose_restriction_allowed_axis_origin', 'pose_restriction_filter_final_poses_only', 'pose_restriction_max_angle_diff', 'pose_restriction_reference_pose', 'self_similar_poses', 'symmetry_axis_direction', 'symmetry_axis_origin', 'symmetry_poses'
GenParamValue (input_control) attribute.value(-array) → (real / string / integer)
Value of the parameter.
Suggested values: 'true', 'false', [], [0, 0, 0, 0, 0, 0, 0], [0, 0, 1]
Result🔗
set_surface_model_param returns 2 (H_MSG_TRUE) if all parameters are
correct. If necessary, an exception is raised.
Combinations with other operators🔗
Combinations
Possible predecessors
create_surface_model, read_surface_model, get_surface_model_param
Possible successors
find_surface_model, refine_surface_model_pose, write_surface_model, find_surface_model_image, refine_surface_model_pose_image
See also
Module🔗
3D Metrology